Traffic Tactician is a training program made in C++ for a university assignment. The goal was to train traffic controllers in the Netherlands so that they can control the flow of traffic during events.
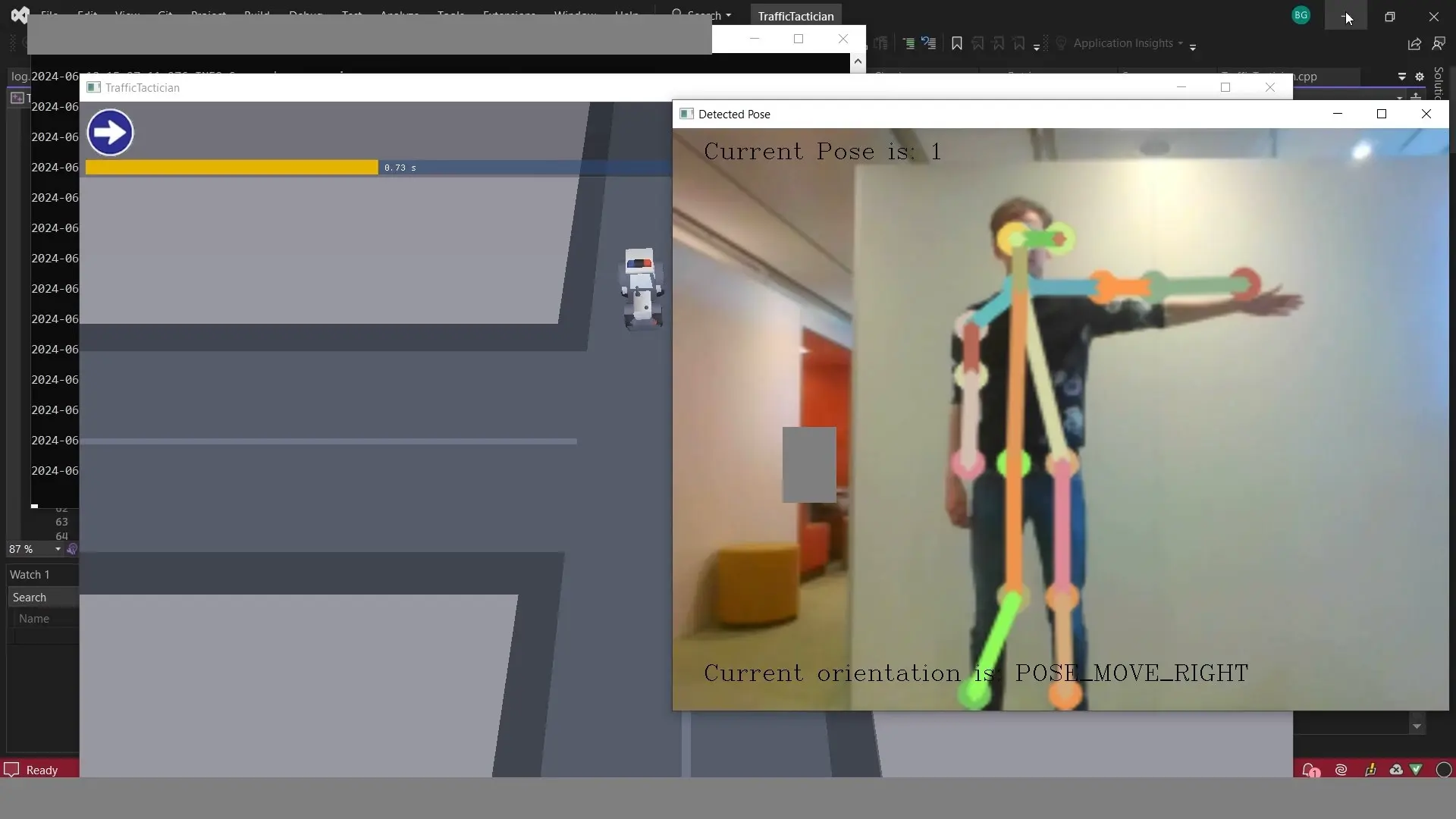
Graphics were programmed using OpenGL, utilizing our own model-loader. We used OpenCV's DNN module to gather positions on the players body. The models, being the cars and roads, were gathered from Kenney's assets.
Some prominent features are:
- Kinect-like controls using CPU-only pose estimation. It is that fast!
- Point system to see how well you've progressed.
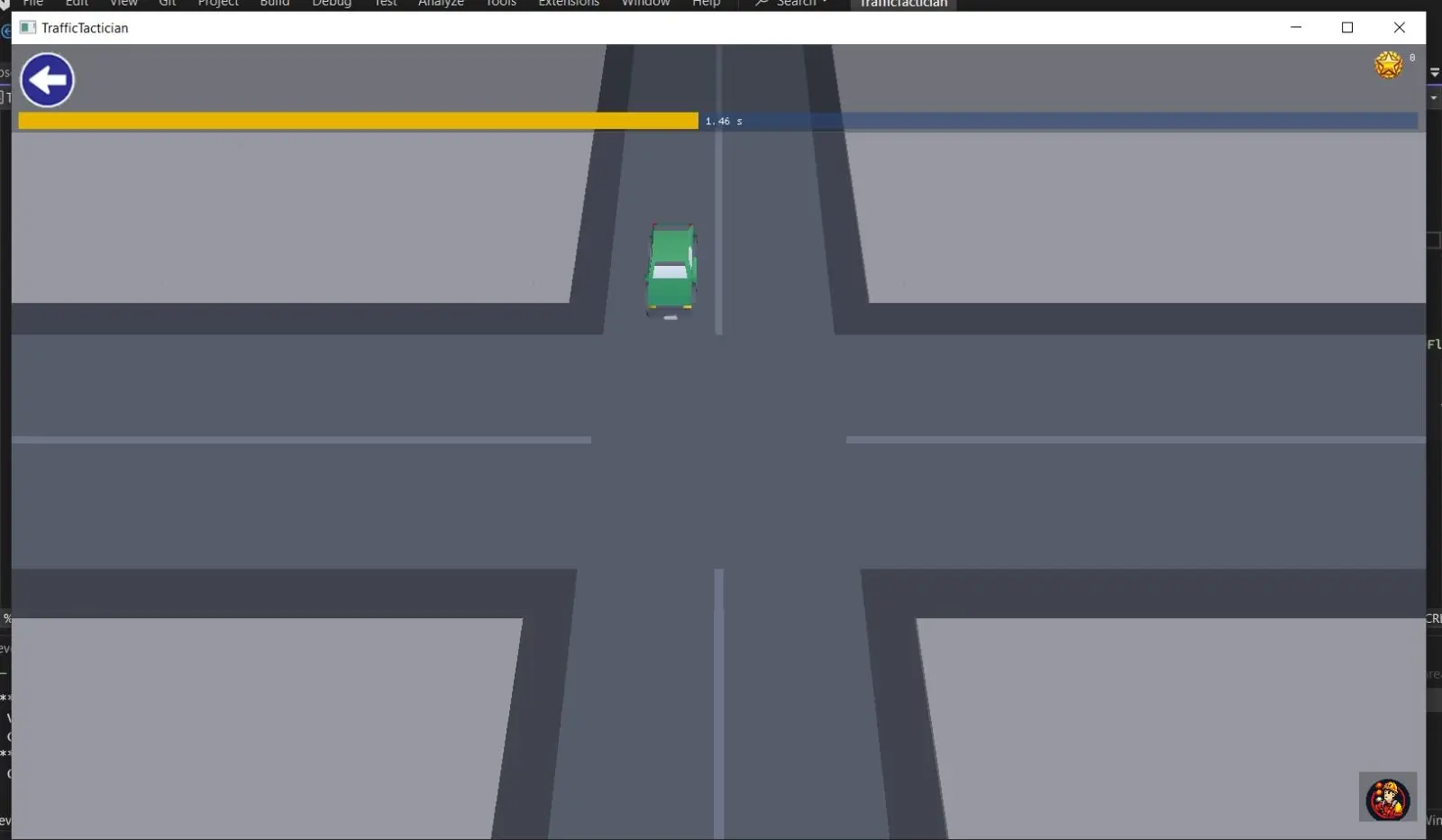
- 3D environment using OpenGL.
- Random spawning mechanism.
- Audio (Car go vroom!)
- Application launcher.
⚠ Note: Ensure that your environment variables are configured correctly for OpenCV. This includes a variable "OPENCV" that leads to your OpenCV build folder (e.g. C:\opencv). Your Path variable should also contain the C:\opencv\build\x64\vc16\bin directory or equivalent.
⚠ Note: Make sure to download the pose_iter_440000.caffemodel from the CMU School of Computer Science, and put it in $SolutionDir\TrafficTactician\pose\coco.
⚠ Note: In case of getting the "could not find opencv_world490d.lib" error, check that you have installed (the right version of) OpenCV correctly, and have configured it in your environment variables. Alternatively, you can drag the .dll files manually into $SolutionDir\TrafficTactician\x64$ConfigurationName.
⚠ Note: Make sure to build the solution when making changes to settings.json to ensure having the updated header file.